遠(yuǎn)程教育投稿論文格式參考:數(shù)智時(shí)代人機(jī)協(xié)同教學(xué)的決策機(jī)制研究
關(guān)鍵詞:人機(jī)協(xié)同教學(xué);教學(xué)決策;決策機(jī)制;數(shù)據(jù)驅(qū)動(dòng);數(shù)據(jù)啟發(fā);生成式人工智能
作者:彭紅超;韓小利
作者單位:華東師范大學(xué)
[摘 要]人機(jī)協(xié)同教學(xué)是數(shù)智時(shí)代的典型教學(xué)范式,但因協(xié)同決策機(jī)制的缺失,其創(chuàng)新發(fā)展不盡如人意。 針對(duì)這一問 題,在解析各階段人機(jī)協(xié)同教學(xué)理念及其決策樣態(tài)的基礎(chǔ)上,結(jié)合人機(jī)優(yōu)勢(shì)互補(bǔ)原則,構(gòu)建了能夠處理不同復(fù)雜度 教學(xué)事務(wù)、兼容教師不同程度參與的人機(jī)協(xié)同教學(xué)決策機(jī)制,包括業(yè)務(wù)邏輯連貫的教學(xué)事務(wù)的復(fù)雜度判定機(jī)制、人 機(jī)協(xié)同決策的分流機(jī)制以及三條人機(jī)協(xié)同的教學(xué)決策路徑。 三條路徑分別為:教師輔助人工智能(AI)進(jìn)行決策的數(shù) 據(jù)驅(qū)動(dòng)協(xié)同路徑、教師與 AI 在決策過程中相互配合以生成決策的數(shù)據(jù)啟發(fā)協(xié)同路徑以及教師統(tǒng)籌安排部分任務(wù)給 AI 決策的設(shè)計(jì)驅(qū)動(dòng)協(xié)同路徑。 研究成果有助于業(yè)界同仁理解人機(jī)協(xié)同教學(xué)的底層機(jī)理,并能夠?yàn)槿藱C(jī)協(xié)同教學(xué)的本 地化實(shí)踐與優(yōu)化提供有價(jià)值的參考。
一、引言
伴隨著大數(shù)據(jù)、云計(jì)算,尤其是生成式人工智能 (generative artificial intelligence,GenAI)等的迅猛發(fā) 展和應(yīng)用, 我們迎來了以數(shù)據(jù)和智能技術(shù)為核心驅(qū) 動(dòng)力的數(shù)智融合新時(shí)代。 黨的二十大報(bào)告指出要推 進(jìn)教育數(shù)字化, 而這一轉(zhuǎn)型的重要目標(biāo)即實(shí)現(xiàn)業(yè)務(wù) 模式重構(gòu),讓大規(guī)模個(gè)性化教育成為可能(懷進(jìn)鵬, 2023)。 聚焦到課堂教學(xué),此目標(biāo)表現(xiàn)為通過形成人 機(jī)協(xié)同模式, 為每一位學(xué)生提供適合其學(xué)習(xí)需求的 “定制化”服務(wù)(吳砥,等,2022),教師與智能機(jī)器的 協(xié)同是教育數(shù)字化轉(zhuǎn)型成敗的決定性因素(劉三女牙, 等,2023), 他們之間的協(xié)同決策機(jī)制則是亟待攻克 的重要課題。
原因在于以下幾方面:首先,在班級(jí)授課制下, 教師無法持續(xù)了解所有學(xué)生的實(shí)時(shí)情況, 并及時(shí)作 出個(gè)性化決策,人工智能在這方面可以幫到教師。 然 而,即使是 ChatGPT、DeepSeek 這類先進(jìn)的生成式人 工智能, 因經(jīng)常出現(xiàn)幻覺、 知識(shí)立場(chǎng)不堅(jiān)定等問題 (Feuerriegel,et al.,2024),人工智能依然需要教師優(yōu) 化其創(chuàng)造性、申辯性的教學(xué)決策。 第二,在真實(shí)的課 堂中,教學(xué)決策事務(wù)復(fù)雜多樣,且大多數(shù)事務(wù)并非呈 現(xiàn)人機(jī)優(yōu)勢(shì)兩極分化,所以,教師與人工智能無法簡(jiǎn) 單分工 (Holstein,et al. ,2022) 。第三,智能教育產(chǎn)品 的應(yīng)用已開始由智能評(píng)測(cè)、 管理等外圍場(chǎng)景深入到 課堂的教與學(xué)等核心場(chǎng)景(劉邦奇,等,2021),并且 相應(yīng)的人機(jī)協(xié)同教學(xué)模式、 路徑等創(chuàng)新已屢見不鮮 (高瓊,等,2021;武法提,等,2024),但協(xié)同決策機(jī)制 的缺失,導(dǎo)致中小學(xué)課堂教學(xué)并未發(fā)生根本性變化, 教學(xué)活動(dòng)仍然以傳統(tǒng)的方式組織(袁振國(guó),2023)。
可見,推進(jìn)數(shù)智時(shí)代教育數(shù)字化,需破解人機(jī)協(xié) 同教學(xué)的決策機(jī)制這一核心問題。 本研究基于對(duì)人 機(jī)協(xié)同教學(xué)發(fā)展的認(rèn)識(shí), 構(gòu)建了人機(jī)協(xié)同教學(xué)決策 機(jī)制框架,并圍繞這一決策機(jī)制,著力解決以下三個(gè) 核心問題: 一是教學(xué)事務(wù)的復(fù)雜度該如何判定? 二 是如何為不同復(fù)雜度的教學(xué)事務(wù)選擇合適的協(xié)同決 策路徑(即如何分流)? 三是不同決策路徑下的運(yùn)行 機(jī)制是怎樣的(即人機(jī)如何協(xié)同)?
二、人機(jī)協(xié)同教學(xué)的發(fā)展
隨著技術(shù)的發(fā)展與進(jìn)步, 人機(jī)協(xié)同的理念從工 程計(jì)算機(jī)領(lǐng)域滲入到了教育領(lǐng)域。 在該領(lǐng)域,人機(jī)協(xié) 同教學(xué)是教師與機(jī)器遵循優(yōu)勢(shì)互補(bǔ)原則, 相互配合 開展教學(xué)的一種形式。 教學(xué)本質(zhì)上是連續(xù)做出教學(xué) 決策的過程(Verma,et al.,2020),因此,人機(jī)協(xié)同教 學(xué)是一種決策分配活動(dòng)(吳茵荷,等,2021),涉及如 何一同探索、判斷、選擇教學(xué)活動(dòng)或策略(管玨琪, 等,2019)。 當(dāng)前,與教師協(xié)同的機(jī)器已不再局限于計(jì) 算機(jī),也不再僅是從屬關(guān)系的工具,總體來講,大致 經(jīng)歷了以下四個(gè)發(fā)展階段(見表 1)。
(一)工具式協(xié)同階段
在這一階段, 人機(jī)協(xié)同起始于斯金納的程序教學(xué)。
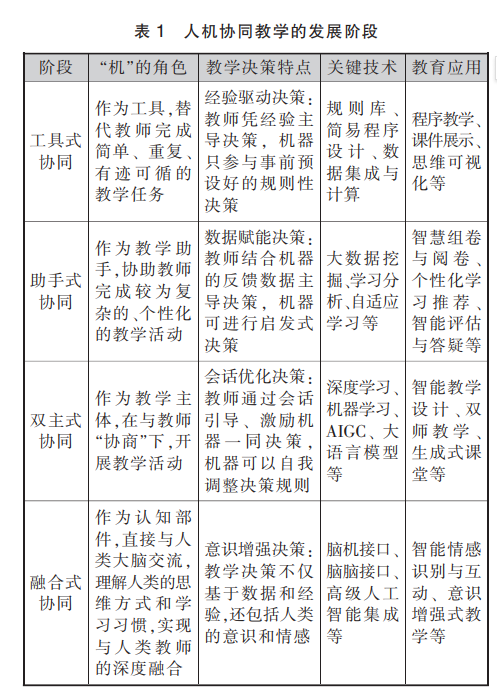
其中,機(jī)器的個(gè)性化反應(yīng)完全依據(jù)預(yù)設(shè)好的簡(jiǎn)單 規(guī)則或標(biāo)準(zhǔn)做出, 高度依賴人的操作, 并且靈活性 低。 此時(shí)機(jī)器在人機(jī)協(xié)同教學(xué)中充當(dāng)教學(xué)工具,替代 教師完成一些簡(jiǎn)單、重復(fù)、有跡可循的教學(xué)工作。 如 著名的 CAT(computerized adaptive testing)系統(tǒng),可 幫 助 教 師 將 學(xué) 生 調(diào) 整 至 預(yù) 設(shè) 學(xué) 習(xí) 路 線 的 某 處 (Weiss,et al.,1984); 米基奇等開發(fā)的 CHARLIE 系 統(tǒng),可替代教師完成知識(shí)點(diǎn)的澄清與解釋、統(tǒng)計(jì)和分 析學(xué)生表現(xiàn)等基礎(chǔ)常規(guī)的教學(xué)任務(wù) (Mikic,et al., 2009)。 在此階段的人機(jī)協(xié)同教學(xué)中,教師是決策主 體,具有絕對(duì)“話語權(quán)”。 而機(jī)器僅參與一些規(guī)則性決 策(甚至只為教師提供輔助性信息),其決策規(guī)則也 是教師依據(jù)自身教學(xué)經(jīng)驗(yàn)和智慧事前預(yù)設(shè)好的。 因 此, 這一階段的人機(jī)協(xié)同教學(xué)決策仍屬于經(jīng)驗(yàn)驅(qū)動(dòng) 范疇。 智能機(jī)器僅作為執(zhí)行工具,按照固定程序輔助 教學(xué),缺乏主動(dòng)適應(yīng)學(xué)習(xí)者需求的能力,以及在復(fù)雜 教學(xué)場(chǎng)景下的應(yīng)變和創(chuàng)新能力。
(二)助手式協(xié)同階段
助手式協(xié)同階段的人機(jī)協(xié)同教學(xué), 始于大數(shù)據(jù) 及其智能分析技術(shù)的興起。 在這一階段,機(jī)器能夠根 據(jù)人的指令或行為做出更加智能化的響應(yīng),借此,機(jī) 器躍升為教師助手, 不僅協(xié)助教師完成基礎(chǔ)的教學(xué) 任務(wù), 也根據(jù)學(xué)生的學(xué)習(xí)數(shù)據(jù)提供個(gè)性化的學(xué)習(xí)建 議和支持。 此時(shí)的機(jī)器,不再簡(jiǎn)單通過一一嘗試預(yù)設(shè) 好的規(guī)則或路徑得到最優(yōu)解, 而是根據(jù)已有的經(jīng)驗(yàn) 發(fā)現(xiàn)“行之有效”的決策思路或途徑,做出啟發(fā)式?jīng)Q 策。 不過,這種決策方法僅能對(duì)某一特定問題具有良 好效果, 如在教學(xué)評(píng)價(jià)方面表現(xiàn)優(yōu)秀的智能系統(tǒng)在 教學(xué)互動(dòng)中的表現(xiàn)卻不盡如人意。 所以,這一協(xié)同階 段的機(jī)器僅是一個(gè)領(lǐng)域人工智能加持的 “專才”,并 且有智能而沒有智慧、有智商而沒有情商(戴茂堂, 等,2023)。 另外,啟發(fā)式?jīng)Q策通過減少嘗試的數(shù)量, 快速得到?jīng)Q策方法, 但無法保證得到的方法是最優(yōu) 的,甚至有失敗的可能,因此,教師需要結(jié)合機(jī)器的 反饋數(shù)據(jù)調(diào)整、優(yōu)化甚至主導(dǎo)決策。 不難發(fā)現(xiàn),這一 階段的協(xié)同, 其教學(xué)決策已經(jīng)轉(zhuǎn)向數(shù)據(jù)賦能決策的 范疇。
(三)雙主式協(xié)同階段
雙主式協(xié)同階段的人機(jī)協(xié)同教學(xué), 起始于深度 學(xué)習(xí)、人工智能生成內(nèi)容(artificial intelligence generated content,AIGC)等人工智能技術(shù)的廣泛普及應(yīng) 用。 與之前符號(hào)主義基于邏輯和規(guī)則階段所不同的 是,此階段的人工智能是生成式的,能夠生成新的內(nèi) 容、規(guī)則或模式,具有廣泛的適用性和通用性(即由 “專才”走向“全才”),如 ChatGPT 可以應(yīng)用于教學(xué)設(shè) 計(jì)、課堂輔導(dǎo)、教學(xué)監(jiān)管與測(cè)評(píng)等各個(gè)環(huán)節(jié)(尚智叢, 等,2023)。 生成式人工智能持續(xù)的學(xué)習(xí)和進(jìn)化能力, 使其不僅可以作為教師助手, 也可以作為教學(xué)主體 之一,它能夠與教師進(jìn)行深度“協(xié)商”,共同制定和執(zhí) 行教學(xué)計(jì)劃。 然而,人工智能的持續(xù)學(xué)習(xí)和進(jìn)化能力 可能導(dǎo)致其產(chǎn)生意想不到的行為,因此,需要建立監(jiān) 督機(jī)制和責(zé)任制度來管控人工智能系統(tǒng)的行為,尤其 需要對(duì)人工智能所生成的內(nèi)容進(jìn)行嚴(yán)格的倫理審查, 以確保其符合教育道德和價(jià)值觀。這一階段的決策過 程呈現(xiàn)為會(huì)話優(yōu)化決策,教師以自然語言與機(jī)器會(huì)話 引導(dǎo)和激勵(lì)機(jī)器,同時(shí)機(jī)器也能根據(jù)教學(xué)場(chǎng)景和學(xué)生 反饋?zhàn)晕艺{(diào)整決策規(guī)則。 這種雙向的、動(dòng)態(tài)的決策機(jī) 制使得教學(xué)過程更加靈活和個(gè)性化, 更加精準(zhǔn)地適 應(yīng)學(xué)生的多樣化需求和不斷變化的教學(xué)環(huán)境。
(四)融合式協(xié)同階段
融合式協(xié)同階段的人機(jī)協(xié)同教學(xué), 依托最前沿 的人工智能與腦科學(xué)研究成果, 尤其是腦機(jī)接口與 腦腦接口技術(shù)取得的重大突破。 此階段,機(jī)器可以直 接與教師和學(xué)生的大腦交互, 實(shí)現(xiàn)思維和知識(shí)的直 接傳輸。 例如,利用腦機(jī)接口技術(shù),直接捕捉學(xué)生的 認(rèn)知狀態(tài)和學(xué)習(xí)需求(Miah,et al.,2024),實(shí)時(shí)調(diào)整 教學(xué)內(nèi)容和方式, 以最符合學(xué)生大腦活動(dòng)模式的方 式進(jìn)行教學(xué)(Gnedykh,2021)。 從教學(xué)決策的角度來 看,這一階段的智能機(jī)器成為認(rèn)知的一部分,教師可 以通過意念、 情感等大腦活動(dòng)驅(qū)使機(jī)器與學(xué)生互動(dòng) (即意識(shí)增強(qiáng)決策)。 教師、學(xué)生和機(jī)器這種無縫協(xié)同 的決策生態(tài),不僅能實(shí)現(xiàn)知識(shí)的無損傳輸,還能最大限度地突破生理、表達(dá)、行為等各種限制或障礙(翟 雪松,等,2022)。 因此,有學(xué)者預(yù)言,這類人機(jī)融合智 能極有可能是人工智能的高級(jí)階段, 甚至可能是最 終階段(李平,等,2018),然而,此階段的人類在人工 智能面前更加透明,“教學(xué)主體的大腦隱私” 這一極 為重要的生物特征,需要得到高度重視和保障(Ienca,et al.,2017)。
以上各階段反映了人機(jī)協(xié)同教學(xué)在特定時(shí)期的 教學(xué)理念和決策樣態(tài)的演進(jìn)脈絡(luò)。 然而各階段并非 呈線性或相互排斥的關(guān)系, 而是基于各自關(guān)鍵技術(shù) 和教育需求,并行發(fā)展、相輔相成,共同推動(dòng)教育數(shù) 字化的變革與創(chuàng)新。
三、人機(jī)協(xié)同教學(xué)決策機(jī)制的框架
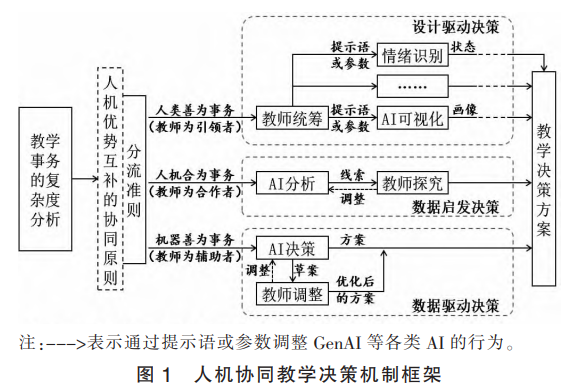
上述各階段的人機(jī)協(xié)同方式看似涇渭分明、互 不干擾,但在實(shí)際教學(xué)中,我們往往無法簡(jiǎn)單按照其 中一種或幾種行事, 而是需要根據(jù)特定的教學(xué)任務(wù) 復(fù)雜程度,靈活、創(chuàng)新性地應(yīng)用不同協(xié)同方式進(jìn)行教 學(xué)決策,其基本原則是“把適合機(jī)器做的事讓機(jī)器來 做,把適合人做的事讓人來做,把適合人機(jī)合作的事 讓人與機(jī)器一起來做(祝智庭,等,2021)”。 以此為基 礎(chǔ),本研究構(gòu)建的框架如圖 1 所示,具體包括教學(xué)事 務(wù)復(fù)雜度分析、 人機(jī)協(xié)同決策分流和人機(jī)協(xié)同教學(xué) 決策路徑三個(gè)部分。 其中,復(fù)雜度分析為后續(xù)的決策 分流提供依據(jù), 決策分流關(guān)注如何將不同事務(wù)分流 至合適的路徑中, 決策路徑關(guān)注教師與智能機(jī)器協(xié) 同決策的具體執(zhí)行。
(一)教學(xué)事務(wù)復(fù)雜度分析
教學(xué)事務(wù)是復(fù)雜多樣的, 包括課程的設(shè)計(jì)與規(guī) 劃、教學(xué)資源的準(zhǔn)備、課堂教學(xué)實(shí)施、學(xué)習(xí)成就的評(píng) 估與反饋等,這種復(fù)雜性源于多方面,如學(xué)生個(gè)體的 多樣性(需關(guān)注個(gè)體差異)、教學(xué)內(nèi)容的廣泛性(涉獵 豐富多樣的知識(shí)領(lǐng)域)、教學(xué)方法的多變性(針對(duì)不 同教學(xué)目標(biāo)和學(xué)生群體靈活運(yùn)用教學(xué)方法) 以及教 學(xué)環(huán)境的動(dòng)態(tài)性 (教師需及時(shí)了解并應(yīng)對(duì)環(huán)境的不 斷變化)。 數(shù)智教育中的教學(xué)事務(wù)不僅包括傳統(tǒng)的教 學(xué)事務(wù),還涉及與數(shù)智技術(shù)相關(guān)的新興任務(wù)和挑戰(zhàn), 如 AI 滲透下的新質(zhì)人才培養(yǎng)、DeepSeek 等智能技 術(shù)的融合應(yīng)用。 隨著技術(shù)應(yīng)用的廣泛性和深度的增 加,這些事務(wù)也呈現(xiàn)出新的復(fù)雜性特點(diǎn)。 當(dāng)前,人機(jī) 協(xié)同成為應(yīng)對(duì)這種復(fù)雜性并推動(dòng)教育創(chuàng)新的重要途 徑,因?yàn)槿祟愔y恰是機(jī)器之易,機(jī)器之易恰是人類 之難(Erickson,2002),二者恰好可以優(yōu)勢(shì)互補(bǔ)。 為了 最大化人機(jī)協(xié)同效能, 首要步驟是開展教學(xué)事務(wù)的 復(fù)雜度分析。 這一分析的核心目的是明確區(qū)分哪些 教學(xué)任務(wù)適合由機(jī)器執(zhí)行, 哪些需人類教師負(fù)責(zé)完 成,從而為后續(xù)的人機(jī)分流機(jī)制提供依據(jù)。
(二)人機(jī)協(xié)同決策分流
人機(jī)協(xié)同教學(xué)的決策分流機(jī)制旨在建立不同復(fù) 雜度的教學(xué)事務(wù)與人機(jī)各自優(yōu)勢(shì)的映射規(guī)則, 明確 教學(xué)事務(wù)合理的“決策負(fù)責(zé)人”(教師或機(jī)器),以充 分發(fā)揮人類智慧和機(jī)器智能。 首先對(duì)于復(fù)雜度低的 事務(wù),因其規(guī)則性強(qiáng)、重復(fù)性高且易于標(biāo)準(zhǔn)化執(zhí)行, 多是機(jī)器善為事務(wù)。 同時(shí),一些“灰色地帶”的任務(wù)處 于混沌狀態(tài),既需要機(jī)器的計(jì)算和數(shù)據(jù)處理能力,也 需要人類的直覺和創(chuàng)造力, 屬于人機(jī)合為事務(wù)(Xiang,et al.,2023)。 而對(duì)于復(fù)雜度高的事務(wù),需要濃厚 的教育情懷和克服挑戰(zhàn)的意志, 并且相關(guān)決策的實(shí) 施也需要根據(jù)實(shí)際靈活變通, 即使是大模型支持的 機(jī)器也難以勝任, 屬于人類善為事務(wù) (Chan,et al., 2024)。 在這三類教學(xué)事務(wù)中,教師分別擔(dān)任不同的 角色:對(duì)于機(jī)器善為事務(wù),智能機(jī)器能夠高效執(zhí)行標(biāo) 準(zhǔn)化任務(wù),教師則作為輔助者進(jìn)行監(jiān)督和指導(dǎo);對(duì)于 人機(jī)合為事務(wù), 機(jī)器和教師需要共同參與決策和執(zhí) 行,通過相互幫助,做出高質(zhì)量的決策,此時(shí)教師是 合作者;而對(duì)于人類善為事務(wù),教師需要擔(dān)任引領(lǐng)者 角色,發(fā)揮自身的主導(dǎo)作用,僅把決策任務(wù)的一部分 分配給人工智能。 不難發(fā)現(xiàn),教師在這三類教學(xué)事務(wù) 中的參與程度是逐級(jí)遞增的。 通過對(duì)教學(xué)事務(wù)的合 理分流, 可以確保每項(xiàng)任務(wù)都能由最適合的主體負(fù) 責(zé),并經(jīng)過合適的協(xié)同決策路徑提高效率和質(zhì)量。
(三)人機(jī)協(xié)同教學(xué)決策路徑
針對(duì)人類善為、 機(jī)器善為、 人機(jī)合為的教學(xué)事 務(wù),本研究分別以人在旁路、人在回路(Honeycutt,et al.,2020)和人在領(lǐng)路的協(xié)同理念(Guo,et al.,2015) 為基礎(chǔ),明確具體的人機(jī)協(xié)同教學(xué)決策路徑。 處理機(jī)器善為事務(wù), 可選擇數(shù)據(jù)驅(qū)動(dòng)的協(xié)同決 策路徑。
這一路徑遵循人在旁路的協(xié)同理念,如圖 1 所示,智能機(jī)器作為主要決策者,處于決策的主干路 中,教師作為輔助者,處在并聯(lián)的旁路中。 當(dāng)處理決 策事務(wù)時(shí),智能機(jī)器首先利用自身計(jì)算優(yōu)勢(shì),迅速?gòu)?大量教育數(shù)據(jù)中發(fā)現(xiàn)規(guī)律、趨勢(shì),做出證據(jù)支持的客 觀決策。 規(guī)律、 趨勢(shì)的挖掘與分析依賴于機(jī)器算法 對(duì)教育數(shù)據(jù)的分析和處理能力, 只有當(dāng)機(jī)器能力不足時(shí),人類教師才介入優(yōu)化機(jī)器的決策。 雖然數(shù)據(jù)驅(qū) 動(dòng)決策強(qiáng)調(diào)機(jī)器的作用,但教師并非處于被動(dòng)狀態(tài), 因?yàn)榻處熜枰盐諜C(jī)器所作決策的合理性, 讓決策 始終符合教學(xué)實(shí)際情況與需求。
處理人機(jī)合為事務(wù), 可選擇數(shù)據(jù)啟發(fā)的協(xié)同決 策路徑。 這一路徑遵循人在回路的協(xié)同理念,以物理 電路圖做隱喻, 教師以合作者的身份處在串聯(lián)電路 中,與智能機(jī)器在“同一工作流程中”通過交互式對(duì) 話來決策。 每一次對(duì)話,均是教師與智能機(jī)器相互配 合并從中獲得啟發(fā)的過程, 即機(jī)器從大量教育數(shù)據(jù) 中挖掘得到?jīng)Q策線索給教師,教師以此線索提示,結(jié) 合自身經(jīng)驗(yàn),按圖索驥或推理后做出決策。 這一決策 也將作為機(jī)器后續(xù)分析的依據(jù), 如此人機(jī)交互直至 得到有效的決策。 在交互過程中,機(jī)器提供的線索主 要是內(nèi)隱于大數(shù)據(jù)中的教學(xué)規(guī)律、特征或趨勢(shì),如學(xué) 習(xí)者個(gè)體行為與學(xué)業(yè)成就的關(guān)系、 學(xué)習(xí)者能否按期 達(dá)到教學(xué)目標(biāo)要求等, 它們啟發(fā)教師形成調(diào)整教學(xué) 的決策洞見或靈感。
處理人類善為事務(wù), 可選擇設(shè)計(jì)驅(qū)動(dòng)的協(xié)同決 策路徑。 這一路徑遵循人在領(lǐng)路的協(xié)同理念,以物理 電路圖做隱喻, 教師作為引領(lǐng)者處于串聯(lián)電路與并 聯(lián)電路的連接點(diǎn)上,如圖 1 所示。 在這樣的位置,教 師可以發(fā)揮類似多向開關(guān)的作用, 決定智能機(jī)器分 擔(dān)哪些決策任務(wù)。 不難發(fā)現(xiàn),這一協(xié)同決策路徑是人 本驅(qū)動(dòng)的(Schneiderman,2020),教師需要從人本角 度診斷性地審視教育數(shù)據(jù)和人工智能的價(jià)值以及它 們可能的支持作用,并在教學(xué)設(shè)計(jì)時(shí)做好人為布局或 調(diào)控,以便讓智能機(jī)器有能力參與需要人文情懷和意 志且靈活多變的決策事務(wù)。分流至這一路徑上的教學(xué) 事務(wù),具有高度復(fù)雜性和不確定性的特性,其決策往 往無章法可循, 在教學(xué)設(shè)計(jì)時(shí)便做好任務(wù)的分配,便 于充分發(fā)揮人類智慧之優(yōu)勢(shì),提高決策成效。
四、教學(xué)事務(wù)的復(fù)雜度判定機(jī)制
合理分流決策的前提是精準(zhǔn)判定教學(xué)事務(wù)的復(fù) 雜度。 任務(wù)復(fù)雜度是一個(gè)多維概念,通常指完成某個(gè) 任務(wù)所需認(rèn)知、技能和資源的程度,是影響決策過程 和策略的關(guān)鍵因素(Payne,1976),在人機(jī)交互領(lǐng)域, 更是影響著執(zhí)行者的表現(xiàn)(Jacko,et al.,1995)。 現(xiàn)有 研究通常將任務(wù)復(fù)雜度分為主觀復(fù)雜度和客觀復(fù)雜 度(van Iddekinge,et al.,2017),主觀復(fù)雜度主要考 慮任務(wù)與任務(wù)執(zhí)行者之間的聯(lián)合屬性, 如任務(wù)對(duì)認(rèn) 知負(fù)荷、情感投入、知識(shí)技能的需求等;而客觀復(fù)雜 度則指任務(wù)本身的屬性,如任務(wù)要素的數(shù)量、任務(wù)本 身的不確定性等。
創(chuàng)造性和靈活性是典型反映主客觀復(fù)雜度的維 度,前者表征解決任務(wù)所需執(zhí)行者(如人師、機(jī)師和 學(xué)生) 創(chuàng)新思維或能力的程度, 指向數(shù)智教育培養(yǎng) “新質(zhì)人才”的訴求(祝智庭,等,2024);后者表征設(shè) 計(jì)好的任務(wù),在實(shí)施過程中根據(jù)實(shí)際情況調(diào)整、變通 的程度,程度越高,靈活度越大,體現(xiàn)數(shù)智教育需滿 足學(xué)生個(gè)性化差異的特征。 鑒于此,本研究從創(chuàng)造性 和靈活性角度創(chuàng)設(shè)教學(xué)事務(wù)復(fù)雜度的判定圖譜,如 圖 2 所示。

第Ⅰ象限是高創(chuàng)造性高靈活性事務(wù)。 這類復(fù)雜 度的教學(xué)事務(wù), 要求教師突破現(xiàn)有知識(shí)和思維模式 的束縛,優(yōu)化、重構(gòu)甚至創(chuàng)造出新的解決方案,并且 方案在實(shí)施的過程中, 會(huì)根據(jù)實(shí)際教學(xué)情況做出靈 活調(diào)整。 教育數(shù)字化追求教學(xué)范式由供給驅(qū)動(dòng)向需 求驅(qū)動(dòng)轉(zhuǎn)變(祝智庭,等,2023),需求的個(gè)性化與變 化發(fā)展,造就教學(xué)事務(wù)的處理往往不能循規(guī)蹈矩,也 無法完全按照預(yù)設(shè)的解決方案執(zhí)行。 因此,在數(shù)智時(shí) 代,這類復(fù)雜度的教學(xué)事務(wù)具有相當(dāng)比重。 第Ⅱ象限 是高創(chuàng)造性低靈活性事務(wù)。 這類復(fù)雜度的教學(xué)事務(wù), 同樣需要教師制定富有新穎性的解決方案, 但方案 的執(zhí)行不會(huì)與預(yù)先的設(shè)計(jì)有較大出入。 如流暢度是 表征技能表現(xiàn)流利程度的新型指標(biāo), 可使用流暢度 替代成績(jī)指標(biāo)衡量學(xué)生的新質(zhì)素養(yǎng)水平, 其統(tǒng)計(jì)量 “流暢度正確=正確反應(yīng)÷測(cè)量時(shí)間”和“流暢度錯(cuò) 誤=錯(cuò) 誤反應(yīng)÷測(cè)量時(shí)間”(彭紅超, 等,2017) 具有脫敏特 性,執(zhí)行時(shí)無須根據(jù)應(yīng)用場(chǎng)景作調(diào)整。 第Ⅲ象限是低 創(chuàng)造性低靈活性事務(wù),這類復(fù)雜度的教學(xué)事務(wù),不要 求教師打破已有的知識(shí)體系或思維模式, 甚至有現(xiàn) 成的解決方案可利用,并且方案可按部就班執(zhí)行,無 需大幅度調(diào)整。 數(shù)智時(shí)代的教學(xué)過程具有靈活性、動(dòng) 態(tài)生成性,但其靈活性與穩(wěn)定性、生成性與預(yù)設(shè)性是 并存的(彭紅超,等,2023),這種穩(wěn)定性與預(yù)設(shè)性造 就諸多教學(xué)事務(wù)依然可以按照原有方案處理, 如按 照既定的個(gè)性化學(xué)習(xí)適配處方判定何時(shí)在人機(jī)雙師 課堂中組織差異化教學(xué)、 小組合作學(xué)習(xí)或個(gè)體適性 學(xué)習(xí)。第Ⅳ象限是低創(chuàng)造性高靈活性教學(xué)事務(wù)。這類教學(xué)事務(wù)表現(xiàn)出一種穩(wěn)中求變的特質(zhì), 需要教師能 夠敏銳地捕捉教學(xué)場(chǎng)景中的變化,據(jù)此,在實(shí)施過程 中 靈 活 調(diào) 整 已 有 處 理 方 案 , 如 教 師 根 據(jù) 學(xué) 生 與 GenAI 合作探究的結(jié)果, 決定實(shí)施針對(duì)性輔導(dǎo)還是 講授新知。
教學(xué)事務(wù)復(fù)雜度的判定, 按照先判定創(chuàng)造性再 判定靈活性的順序進(jìn)行。 在創(chuàng)造性上,按照其核心屬 性(Brookhart,2013),依次審視教學(xué)事務(wù)在以下四個(gè) 方面的要求:第一,教師想法的深度,從想法不是重 要概念到是來自不同學(xué)科的系列重要概念;第二,原 材料(即未經(jīng)過教師初步加工和處理的原始資料、材 料)的多樣性,從只利用一個(gè)或不可信的原材料到利 用了各式各樣的原材料,如文本、媒體、經(jīng)驗(yàn)等;第 三,想法整合的新穎性,從直接復(fù)刻他人想法到以驚 奇的方式整合;第四,處理方案的預(yù)期價(jià)值,從基本 解決預(yù)期問題到進(jìn)一步識(shí)別出未知的新問題。 在靈 活性上, 基于學(xué)習(xí)環(huán)境中易于感知的靈活性三要素 (Bergamin,et al.,2012)進(jìn)行判定,第一,實(shí)施時(shí)間的 彈性, 開始與持續(xù)的時(shí)間從不可更改到師生可自主 調(diào)控;第二,學(xué)生需求的迎合度,從側(cè)重學(xué)生的共同 需求到適應(yīng)學(xué)生個(gè)體的需求變化;第三,學(xué)生活動(dòng)的 能動(dòng)性,從被動(dòng)接受教師指引到可自主選擇。 另外, 在人機(jī)協(xié)同教學(xué)中,應(yīng)對(duì)突發(fā)技術(shù)故障十分關(guān)鍵,從 無備用方案到能快速啟動(dòng)緊急預(yù)案, 是教學(xué)事務(wù)的 靈活性在柔韌度上的體現(xiàn)。
在判定時(shí), 以創(chuàng)造性和靈活性的各維度作為評(píng) 估框架,將各維度的連續(xù)譜系作四等級(jí)劃分,便可形 成教學(xué)事務(wù)復(fù)雜度的判定量規(guī)(Newell,et al.,2002), 如果創(chuàng)造性或靈活性的總值達(dá)到中等水平以上,便 說明教學(xué)事務(wù)在這方面的復(fù)雜度處于較高水平。
五、人機(jī)協(xié)同決策的分流機(jī)制
厘清教學(xué)事務(wù)的復(fù)雜度之后, 便可以考慮如何 將其分流到合適的路徑, 這涉及人機(jī)協(xié)同決策的分 流機(jī)制,如圖 3 所示。
(一)第Ⅰ象限事務(wù)的分流
第Ⅰ象限事物兼具高創(chuàng)造性和高靈活性。 依據(jù) 自我決定理論(Deci,et al.,2013),個(gè)體在高創(chuàng)造性 任務(wù)中的意志力是突破常規(guī)思維的關(guān)鍵因素, 而靈 活性讓這種意志力更加重要。 因此,第Ⅰ象限事務(wù)的 分流應(yīng)考慮此要素。 鑒于包括 DeepSeek 在內(nèi)的人工 智能均缺乏這種意志力,若事務(wù)對(duì)意志力要求較高, 教師需憑借自身主觀能動(dòng)性更好地應(yīng)對(duì)創(chuàng)新與靈活 性帶來的挑戰(zhàn),此時(shí),第Ⅰ象限事務(wù)應(yīng)引導(dǎo)至設(shè)計(jì)驅(qū) 動(dòng)的協(xié)同決策路徑。 而當(dāng)事務(wù)對(duì)意志力沒有太多要 求時(shí),則需要進(jìn)一步判斷事務(wù)的結(jié)構(gòu)化程度。 依據(jù)認(rèn) 知靈活性理論, 結(jié)構(gòu)化程度低的非良構(gòu)問題 (illstructured problems)需要采用多維表征,并通過設(shè)計(jì) 思維重構(gòu)問題空間(Jonassen,1997)。 因此,這類問題 應(yīng)分流至設(shè)計(jì)驅(qū)動(dòng)的決策路徑, 讓教師在設(shè)計(jì)階段 即可著手此事,將事務(wù)合理解構(gòu)并與人工智能“協(xié)同 處理”。 而結(jié)構(gòu)化程度高的良構(gòu)問題(well-structured problems),計(jì)算機(jī)算法容易與之匹配,因此更適合轉(zhuǎn) 向數(shù)據(jù)啟發(fā)的決策路徑, 讓人工智能先為教師處理 事務(wù)提供富有啟發(fā)的線索。 這樣,決策的效率可以大 幅提高。
(二)第Ⅱ象限事務(wù)的分流
第Ⅱ象限事務(wù)雖有高創(chuàng)造性但靈活性較低。 根 據(jù)標(biāo)準(zhǔn)化作業(yè)理論(Taylor,2004),靈活性較低的事 務(wù)更適合通過特定決策模式進(jìn)行處理, 這種特定性 往往體現(xiàn)為有明顯規(guī)則可循。 因此,規(guī)則性可以作為 判定第Ⅱ象限事務(wù)的關(guān)鍵, 它能夠?yàn)閯?chuàng)造性決策方 案制定提供抓手和方向。 具體而言,若事務(wù)的規(guī)則性 較強(qiáng),則優(yōu)先進(jìn)入數(shù)據(jù)啟發(fā)的協(xié)同決策路徑,以利用 人工智能把這種規(guī)則性挖掘出來, 讓教師后續(xù)的決 策路向更清晰;若規(guī)則性較弱,則需進(jìn)一步判定事務(wù) 對(duì) 專 業(yè) 知 識(shí) 的 精 深 度 需 求 。 按 照 知 識(shí) 創(chuàng) 新 理 論 (Lambooy,2005),當(dāng)精深度觸及知識(shí)本身的邊界時(shí), 分流至設(shè)計(jì)驅(qū)動(dòng)的協(xié)同決策路徑, 由教師主導(dǎo)知識(shí) 的探索更合適。因?yàn)榧词?GenAI 動(dòng)態(tài)生成的內(nèi)容,其 本質(zhì)上也僅是從大量數(shù)據(jù)源中抽取或重組的信息, 只是對(duì)人類語言與思想的復(fù)制和轉(zhuǎn)譯 (孫屹言, 2023)。 若精深度需求不高,僅是需要知識(shí)應(yīng)用上的 創(chuàng)新,則可以分流至數(shù)據(jù)啟發(fā)的決策路徑,由人工智能生成基礎(chǔ)方案,再由教師進(jìn)行創(chuàng)新性修正或補(bǔ)充。

(三)第Ⅲ象限事務(wù)的分流
第Ⅲ象限事務(wù)對(duì)創(chuàng)造性要求較低, 且在實(shí)施時(shí) 無須靈活調(diào)整,此情況下,對(duì)數(shù)據(jù)的依賴性成為重要 的分流依據(jù)。 若數(shù)據(jù)依賴性較低,事務(wù)處理更需要教 師的教學(xué)智慧, 所需數(shù)據(jù)多為有情感溫度的小數(shù)據(jù) (祝智庭,等,2017),此時(shí),可進(jìn)入數(shù)據(jù)啟發(fā)的決策路 徑,讓教師能夠在數(shù)據(jù)線索的輔證下進(jìn)行精準(zhǔn)決策。 若數(shù)據(jù)依賴性較高,則需進(jìn)一步判定。 按照決策行為 理論(March,et al.,1993),決策過程的不確定性也是 影響決策的重要因素,可作為此步的判定點(diǎn)。 具體而 言,若不確定性較高,則需要教師根據(jù)學(xué)生的反饋數(shù) 據(jù)臨場(chǎng)確定決策策略, 這屬于數(shù)據(jù)啟發(fā)決策路徑的 范疇,否則,可分流至數(shù)據(jù)驅(qū)動(dòng)的協(xié)同決策路徑,先 讓人工智能發(fā)揮優(yōu)長(zhǎng), 而教師僅在必要時(shí)核驗(yàn)人工 智能的決策結(jié)果是否合適。 這樣做的好處是,既能充 分發(fā)揮人工智能的高效率又有人類兜底。
(四)第Ⅳ象限事務(wù)的分流
第Ⅳ象限事務(wù)創(chuàng)造性較低但靈活性較高, 需要 頻 繁 應(yīng) 對(duì) 多 變 的 外 部 情 境 。 根 據(jù) 情 境 認(rèn) 知 理 論 (Brown,et al.,1989),處理此類事務(wù)的核心挑戰(zhàn)在于 其對(duì)情境變化的高度敏感性。 若其對(duì)情境變化的敏 感性較高,則更適合采用數(shù)據(jù)驅(qū)動(dòng)的協(xié)同決策路徑, 此路徑中的人工智能往往會(huì)全程記錄學(xué)習(xí)過程并敏 捷感知學(xué)習(xí)情境的變化以提供更為精準(zhǔn)的適配服務(wù) (祝智庭,等,2020);如果敏感性較低,則需進(jìn)一步判 定事務(wù)對(duì)實(shí)時(shí)反饋的依賴程度。 教育反饋理論指出, 實(shí)時(shí)反饋依賴程度對(duì)學(xué)習(xí)效果有顯著影響, 并與決 策路徑密切相關(guān)(Hattie,et al.,2007)。 這一步,如果 依賴程度較高,則應(yīng)分流至數(shù)據(jù)驅(qū)動(dòng)的決策路徑,以 便借助人工智能強(qiáng)大的算力,及時(shí)做出決策;如果依 賴程度較低, 可考慮分流至數(shù)據(jù)啟發(fā)的協(xié)同決策路 徑,以降低高靈活性伴隨的潛在風(fēng)險(xiǎn)。
六、人機(jī)協(xié)同的教學(xué)決策路徑
教學(xué)事務(wù)的復(fù)雜度分析和分流機(jī)制解決了混濁 狀態(tài)下的教學(xué)事務(wù)如何分流的問題,接下來,需要解 決每條協(xié)同決策路徑的具體協(xié)同方略問題。
(一)數(shù)據(jù)驅(qū)動(dòng)的協(xié)同決策路徑
數(shù)據(jù)驅(qū)動(dòng)的人機(jī)協(xié)同決策是教師輔助 AI 進(jìn)行決 策,路徑如圖 4 所示。 AI 通過自動(dòng)監(jiān)測(cè)或用戶上傳等 方式獲取學(xué)習(xí)畫像數(shù)據(jù),然后進(jìn)行數(shù)據(jù)挖掘萃取數(shù)據(jù) 中蘊(yùn)含的價(jià)值,如學(xué)生的行為模式等,以此,AI 利用 學(xué)習(xí)分析技術(shù)對(duì)教學(xué)進(jìn)行診斷、預(yù)測(cè)并開處方,得到 決策草案,如推薦適切的資源(彭紅超,等,2018)。 教 師需要對(duì)這個(gè)決策草案進(jìn)行審查,如果 AI 的決策合 理,則通過審查;如果不適合,則教師認(rèn)真分析數(shù)據(jù)、 探尋原因,重新設(shè)計(jì)決策方案;如果介于兩者之間, 則糾正不當(dāng)之處,填補(bǔ)遺漏部分。 對(duì)于未通過審查的 這兩種情況,教師可以通過優(yōu)化提示語或調(diào)整參數(shù), 指導(dǎo) AI 生成更合理的決策草案。 將通過審查的草案 或教師的決策預(yù)案作為正式方案實(shí)施并監(jiān)控,所得到 的數(shù)據(jù)再次被收集,如此,形成一個(gè)閉環(huán)。
這一協(xié)同決策過程,需要注重以下兩點(diǎn)。 第一, 教師的審查。 它處于樞紐位置, 決定教師是否介入 AI 決策。 之所以如此關(guān)鍵,是因?yàn)闊o論 AI 是否承擔(dān) 了全部決策工作, 教師都需要承擔(dān)全部責(zé)任。 評(píng)估 AI 決策合理性可從以下幾方面著手:①?zèng)Q策的實(shí)施 條件是否具備(即實(shí)施可行性);②決策是否能夠滿 足當(dāng)前學(xué)生的需求或解決遇到的問題 (即即時(shí)有效 性);③決策是否與教學(xué)目標(biāo)吻合(即目標(biāo)一致性), 即使?jié)M足②, 也可能導(dǎo)致教學(xué)向背離目標(biāo)的方向發(fā) 展(Sermsuksan,2019);④決策的數(shù)據(jù)證據(jù)及其來源 是否真實(shí)可靠(即數(shù)據(jù)真實(shí)性);⑤對(duì)于生成式人工 智能的決策,還需要額外審核是否存在歧視、偏見或 其他倫理道德問題(即決策倫理性)。 第二,教師介入 的時(shí)機(jī)和方式。介入是人機(jī)協(xié)同決策的核心問題。協(xié) 同效果的好壞,除決策依據(jù)是否靠譜外,還取決于人 類介入的時(shí)機(jī)和方式是否得當(dāng)(陳凱泉,等,2019)。 時(shí)機(jī)方面,當(dāng) AI 決策不滿足上述任何一條合理性標(biāo) 準(zhǔn)時(shí),教師應(yīng)當(dāng)迅速介入,此外,如若 AI 決策實(shí)施 后,學(xué)生的表現(xiàn)或反饋與預(yù)期存在明顯差異,教師也需要介入干預(yù)。
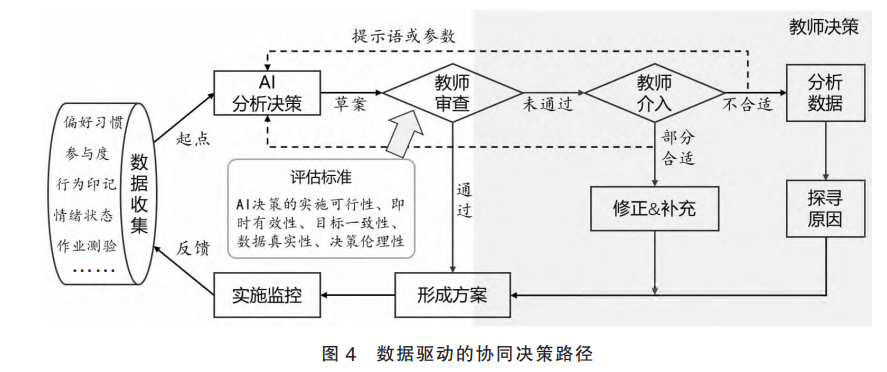
方式方面,可按照便捷性考慮以下幾 種方式: ①通過提示語或調(diào)整參數(shù)優(yōu)化 AI 的決策, 針對(duì)生成式人工智能,可結(jié)合拆分子任務(wù)、投喂專業(yè) 語料、讓機(jī)器自我審查與修改等策略,這樣往往能事 倍功半; ②教師自我修補(bǔ)或重設(shè)決策方案, 具體而 言,教師可通過“專家端倪法”從數(shù)據(jù)中獲得見解(如 發(fā)現(xiàn)其中原因),借助“價(jià)值判斷指標(biāo)”將見解升華為 洞見(即透徹的見解),進(jìn)而形成基于洞見的決策(彭 紅超,等,2018);③還可以發(fā)揮學(xué)生智慧,彌補(bǔ) AI 決 策的缺陷,如引導(dǎo)學(xué)生標(biāo)注“可疑”的決策結(jié)果、設(shè)置 AI 決策偏好,以及組織 AI 答案辯論會(huì)等。
(二)數(shù)據(jù)啟發(fā)的協(xié)同決策路徑
數(shù)據(jù)啟發(fā)的人機(jī)協(xié)同決策是指教師與 AI 在協(xié) 同過程中相互配合生成決策, 路徑如圖 5 所示。 AI 利用大數(shù)據(jù)分析技術(shù)從收集到的數(shù)據(jù)中提煉出有關(guān) 學(xué)習(xí)狀態(tài)與進(jìn)度的線索,并以即席報(bào)表、學(xué)習(xí)儀表盤 或統(tǒng)計(jì)報(bào)告的形式呈現(xiàn)給教師, 教師根據(jù)干預(yù)需求 判定準(zhǔn)則的要求, 進(jìn)行擴(kuò)獵分析得到額外的必要線 索, 并結(jié)合自己的專業(yè)知識(shí)與經(jīng)驗(yàn)探析線索間的相 關(guān)、因果等邏輯關(guān)系,形成學(xué)生是否需要干預(yù)的真知 灼見,之后按照干預(yù)強(qiáng)度的消減機(jī)制制定干預(yù)決策。 和數(shù)據(jù)驅(qū)動(dòng)的協(xié)同路徑一樣, 形成的決策方案通過 實(shí)施監(jiān)控,形成反饋閉環(huán)。

其中, 需求干預(yù)的判定以上述流暢度指標(biāo)作為 測(cè)評(píng)學(xué)生素養(yǎng)水平的指標(biāo), 因?yàn)樗闲沦|(zhì)素養(yǎng) 的本質(zhì)要求:學(xué)生的技能表現(xiàn)越流利,就越有可能在 未來將這項(xiàng)技能應(yīng)用于解決新問題,必要時(shí),越有可 能和其他技能整合成為更復(fù)雜的新技能。 另外,以學(xué) 生素養(yǎng)提升的速度作為判定學(xué)生是否需要干預(yù)的依 據(jù)。 學(xué)生素養(yǎng)水平越高,習(xí)得相同知識(shí)或經(jīng)驗(yàn)獲得的 成長(zhǎng)就越來越少, 體現(xiàn)在圖表中是一條越來越平緩 的曲線。 而在教學(xué)實(shí)踐中,人們更習(xí)慣使用直線來預(yù) 測(cè)學(xué)生的發(fā)展趨勢(shì),使用半對(duì)數(shù)圖表(Aninao,et al., 2015)來可視化學(xué)生的成長(zhǎng)速度(它可以將曲線形狀 “掰成”直線)。 在這種圖表中,判定學(xué)生是否需要干 預(yù)有“斜率法”和“下方點(diǎn)數(shù)法”兩種。
斜率法通過對(duì)比學(xué)生成長(zhǎng)速度與目標(biāo)成長(zhǎng)速度, 預(yù)測(cè)學(xué)生能否在規(guī)定時(shí)間內(nèi)完成學(xué)習(xí)目標(biāo)。使用這種 方法,首先需將目標(biāo)流暢度值以及每次測(cè)驗(yàn)收集的流 暢度得分按順序繪制在圖表中。然后,繪制一條直線, 讓流暢度得分均勻地分布在它的兩側(cè),如此,如果直 線橫穿目標(biāo)值或者在目標(biāo)值的下方, 便可以斷定學(xué) 生能夠在規(guī)定時(shí)間內(nèi)完成學(xué)習(xí)目標(biāo)。 下方點(diǎn)數(shù)法通 過查看最近兩個(gè)測(cè)驗(yàn)得分與目標(biāo)線的相對(duì)位置,來 預(yù)測(cè)學(xué)生能否按期達(dá)標(biāo)。 使用這種方法,首先,將目 標(biāo)流暢度值和第一次測(cè)驗(yàn)得分, 繪制在圖表中,然 后,連結(jié)這兩個(gè)數(shù)值形成一條直線,如果后面的測(cè)驗(yàn) 得分連續(xù)兩次在這條直線下方,那么就可以斷定以當(dāng) 前的狀況,學(xué)生無法按期達(dá)標(biāo),因而有干預(yù)需求。
干預(yù)強(qiáng)度的消減機(jī)制以學(xué)生素養(yǎng)水平與目標(biāo)水 平的差值為動(dòng)力,差值越大,干預(yù)強(qiáng)度越大,且隨差值 的縮小逐漸消退,直至差值達(dá)到可接受的范圍,此時(shí), 即使學(xué)生有干預(yù)需求, 教師也無須制定干預(yù)決策方 案。這一干預(yù)強(qiáng)度的消減機(jī)制與學(xué)習(xí)支架的消退效應(yīng) 吻合(彭紅超,等,2021)。 具體的干預(yù)強(qiáng)度可按照?qǐng)D 5 所示的消減函數(shù)確定,其中,a 表示干預(yù)系數(shù),其值越 大,曲線曲度越小、干預(yù)動(dòng)力越強(qiáng),學(xué)生主體性或自由 度越弱。 此消減函數(shù)基于學(xué)生的能力水平,相比基于 時(shí)間的消減函數(shù)(童名文,等,2020),可避免“學(xué)生隨 時(shí)間的推進(jìn)必定不斷進(jìn)步”這一不合理情況。
(三)設(shè)計(jì)驅(qū)動(dòng)的協(xié)同決策路徑
設(shè)計(jì)驅(qū)動(dòng)的人機(jī)協(xié)同決策是教師統(tǒng)籌安排任務(wù) 給 AI 決策的方式,路徑如圖 6 所示。 在教學(xué)設(shè)計(jì)過 程中, 教師根據(jù)自身實(shí)施教學(xué)活動(dòng)的需求確定關(guān)鍵 的決策任務(wù), 并將任務(wù)拆分為系列子任務(wù)進(jìn)行統(tǒng)一 分配,其中,分配給 AI 的決策任務(wù),通過提示語、參 數(shù)調(diào)整或平臺(tái)配置,引導(dǎo)其理解和執(zhí)行;之后,將AI 形成的系列決策結(jié)果與教師決策進(jìn)行整合, 形成完 整的決策預(yù)案加以實(shí)施、監(jiān)控,并反饋給新一輪的教 學(xué)設(shè)計(jì)。
教師在此條協(xié)同決策路徑中與 AI 分擔(dān)的是決 策子任務(wù)而非決策過程, 這與數(shù)據(jù)啟發(fā)的人機(jī)協(xié)同 決策不同。 決策任務(wù)的拆分遵循“縱向切分優(yōu)先、AI 最大分擔(dān)、職責(zé)明確為準(zhǔn)”三個(gè)原則,即先將決策任 務(wù)沿時(shí)間線拆分, 讓形成的子任務(wù)能夠盡可能多地 并行處理, 然后再考慮將子任務(wù)橫向切斷為粒度更 小的任務(wù)(即縱向切分優(yōu)先);任務(wù)拆分的切入點(diǎn)優(yōu) 先考慮 AI 能夠明確勝任的決策邊界, 以保障 AI 最 大限度分擔(dān)教師工作(即 AI 最大分擔(dān));拆分的粒度 并非越小越好,只要 AI 或教師作為獨(dú)立的決策負(fù)責(zé) 人,其處理子任務(wù)的職責(zé)清晰明了,便無須繼續(xù)拆分 (即職責(zé)明確為準(zhǔn))。
拆分好的子任務(wù)由教師按人機(jī)優(yōu)勢(shì)互補(bǔ)的原則分配, 此處關(guān)鍵是借機(jī)梳理好各子任務(wù)的邏輯關(guān)系 (主要為并列關(guān)系和序列關(guān)系)。 邏輯關(guān)系可用決策 樹表示,即用矩形表示起始點(diǎn),用圓形表示各子任務(wù) 節(jié)點(diǎn),用有向?qū)嵕€表示任務(wù)的先后序列關(guān)系(箭頭指 向后續(xù)節(jié)點(diǎn)),并在實(shí)線旁標(biāo)注前序任務(wù)可提供給后 續(xù)任務(wù)的輸入信息,如果無此信息,則用有向虛線表 示這種序列關(guān)系,如此,同一層級(jí)的任務(wù)節(jié)點(diǎn)屬于并 列關(guān)系,無須額外符號(hào)表示。
AI 決策結(jié)果與教師決策方案的合成,無法直接 依據(jù)子任務(wù)的拆分順序和邏輯關(guān)系完成,因?yàn)?AI 的 決策結(jié)果不一定合理,且很多時(shí)候并非單個(gè)結(jié)果。 鑒 于此,教師可將第一條協(xié)同決策路徑中的“AI 決策 合理性評(píng)估標(biāo)準(zhǔn)”作為篩選規(guī)則,并制定 AI 系列決 策結(jié)果的實(shí)施優(yōu)先級(jí), 以便指導(dǎo)完整決策預(yù)案的形 成。 在制定優(yōu)先級(jí)時(shí), 教師需要注意避免沉錨效應(yīng) (anchoring effect)(Tversky,et al.,1974)的干擾,即避 免因決策實(shí)效未知,過度對(duì)標(biāo)子任務(wù)的邏輯關(guān)系(即 錨點(diǎn)),從而忽視了教學(xué)目標(biāo)與學(xué)生需求。

七、結(jié)語
人機(jī)協(xié)同教學(xué)是數(shù)智時(shí)代的必然教學(xué)范式,其 中協(xié)同決策是實(shí)現(xiàn)教師智慧與人工智能的優(yōu)勢(shì)互 補(bǔ),達(dá)成 1+1>2 的關(guān)鍵,也是實(shí)現(xiàn)教育數(shù)字化轉(zhuǎn)型的 核心問題。 聚焦于協(xié)同決策機(jī)制,本研究建構(gòu)了整體 框架, 并進(jìn)一步研制了框架內(nèi)的教學(xué)事務(wù)復(fù)雜度判 定機(jī)制、 人機(jī)協(xié)同決策分流機(jī)制以及三條人機(jī)協(xié)同 教學(xué)決策路徑。 其中,復(fù)雜度判定為后續(xù)的決策分流 提供依據(jù), 決策分流關(guān)注如何將不同事務(wù)分流至合 適的路徑中, 決策路徑關(guān)注教師與人工智能如何相 互配合進(jìn)行決策。
此人機(jī)協(xié)同決策機(jī)制既考慮了數(shù)智教育中不同 教學(xué)事務(wù)的復(fù)雜度 (基于創(chuàng)造性和靈活性視角歸為 四類),也顧及了教師在協(xié)同決策中應(yīng)有的不同參與 度,即作為輔助者審核和完善 AI 的決策、作為合作 者一同參與 AI 的決策,以及作為引領(lǐng)者部署和分配 決策任務(wù)給 AI。 第一種,教師其實(shí)只是 AI 決策結(jié)果 的接收者;第二種,教師深入到了 AI 的決策過程;而 第三種, 教師還可以拆分決策任務(wù)。 但需要注意的 是,無論參與度如何,教師都擁有絕對(duì)話語權(quán),因?yàn)?人工智能的參與本質(zhì)上是教學(xué)設(shè)計(jì)者在參與, 它只 不過是教師的一種“替代”(陳贊安,等,2021)。 秉承 此觀念與智能機(jī)器協(xié)同進(jìn)行教學(xué)決策, 會(huì)更有利于 人機(jī)協(xié)同教學(xué)的創(chuàng)新發(fā)展, 進(jìn)而助力國(guó)家教育數(shù)字 化戰(zhàn)略目標(biāo)的達(dá)成。
教育相關(guān)核刊
教育類相關(guān)問題解答
- 教育學(xué)容易投稿的SSCI一二三四區(qū)期刊,80%的老師都想發(fā)!
- 教育學(xué)和教育研究方向發(fā)什么sci期刊(6本)
- 北大核心有哪些期刊?醫(yī)學(xué)和教育方向熱門期刊一覽表
- 評(píng)職老師必看!北大核心+CSSCI《教師教育研究》《高等教育研究》《思想教育研究》
- 《思想政治教育研究》審稿周期多久?費(fèi)用多少
- 北大核心+AMI擴(kuò)展《教育理論與實(shí)踐》評(píng)副高教授認(rèn)可的刊物
- 教育方向,所有審稿快錄用比例高ssci期刊都在這里
- 教育和醫(yī)學(xué)類容易投稿的sci中科院一區(qū)期刊,含金量超高!
- 山東教育雜志評(píng)職稱自己投稿可以嗎?評(píng)職稱認(rèn)可度
- 評(píng)職稱需要幾年的繼續(xù)教育